+86-13858039910
With the upcoming Industry 4.0 and rapid development of intelligent equipment, traditional injection moulding industry begins to substitute robot manipulation for manual operation.
Injection moulding manipulators are one of the intelligent equipments of automated production in injection moulding industry, which consist of varous systems like driving system and control system.
The main purpose of designing execution system and driving system is to complete normal function of robot arms, which realizes pneumatic and electric driving to operate mechanical components, reaching the goal of fetching objects, reducing heavy physical labour and improving working condition and safe production.
It can also improve the production efficiency of injection moulding make-up machine, stabilize products quality, decrease defective index and strengthen competitiveness of enterprises.
There are many functions that injection moulding manipulators own, such as automatic degating, in-mold inserting, in-mold labeling, classification and stacking.
Automatic degating of robot arms:
It means that the function of degating is interconnected with manipulators, implementing the synchronous process of fetching products while cutting the nozzle.
In-mold inserting of robot arms:
It means molding thermoplastic plastic or thermosetting plastic into plastic products in various shapes with plastic injection moulds.
In order to shape different forms, generally, some metal inserts or components will be put into the make-up mould before the injection occurs. After the injection, the traditional process is inserting metal components into it and fetching the finished products manually.
Such manual operation attaches much problems, which goes against the improvement of production efficiency. Meanwhile, because of high temperature of injection liquid, which is adverse to workers' physical safety, so it needs corresponding technical improvement.
The stacking function of robot arms:
In line with requirements from customers, we can customize automatic stacking machines, automatic delivery sequencing sorting machines and plastic cartridge folding machines.
After automatic positioning, the stacker belt begins its die cutting and shaping, then the robot arm fetching materials and loading them in needed position. Finally, boxes under blanking machine enforce automatic stacking.
During the whole process, except for manual fetching of piled boxes from blanking machine, there isn't any other manual action in it. The equipment has compact structure that saves space for more convenient operation.
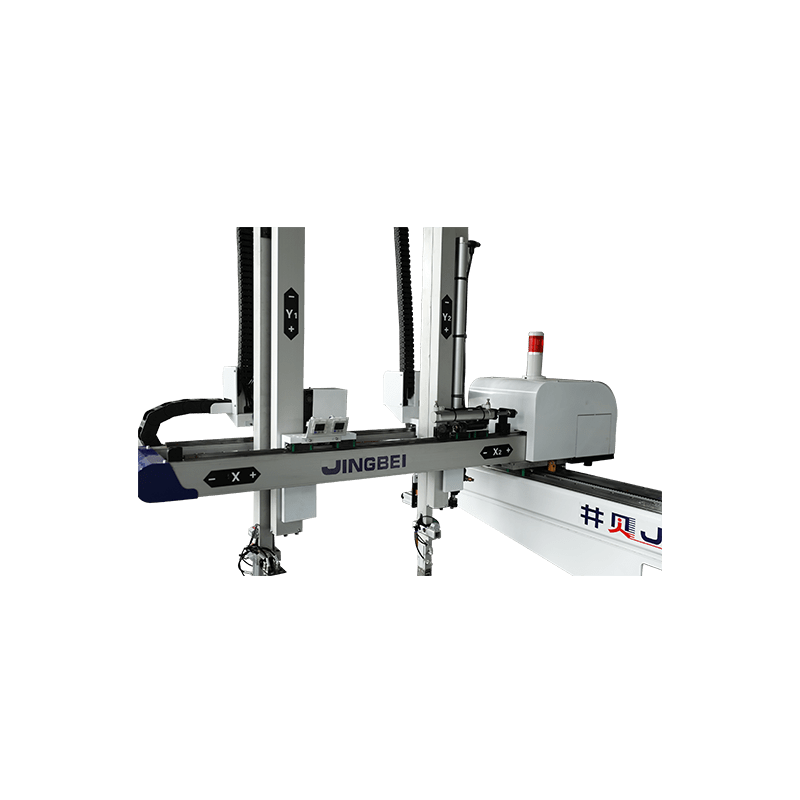
servo Traverse robot
Copyright © Jingbei Technology (Zhejiang) Co., Ltd. Rights Reserved. China Servo Injection Molding Robots Manufacturers