+86-13858039910
A 3-axis servo manipulator works by rotating a series of joints and compensating for the error of feedforward velocity. This enables the end of the manipulator to follow a target with good accuracy. The final position error is usually zero. The method is verified using a simulation system.
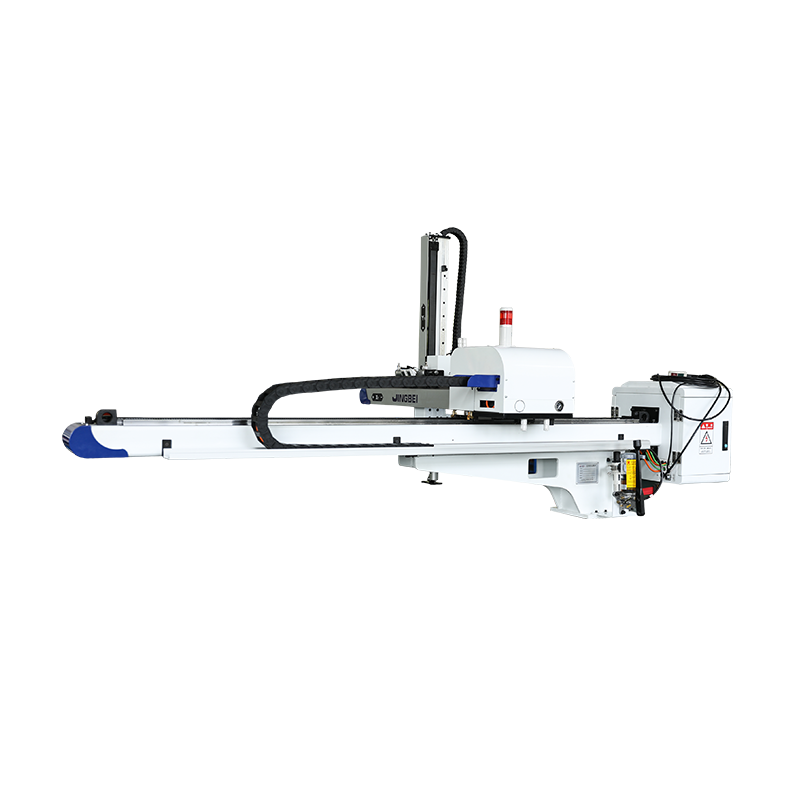
In order to use this type of robot, the user must first create a programming program, called a JOB. It consists of instructions that tell the robot to do a certain action, and data to use when the robot performs the action. This program is then used to drive the robot. The robot's end effector is linked to the control system via an end-effector link, which provides rotational and translational degrees of freedom. The movement of the joints is coordinated to provide predictable paths irrespective of speed and distance, as well as the shortest pick-and-place cycle times.
The servo motors rotate depending on pulse width modulation. At rest, the output spline is at zero degrees, but a 20 millisecond pulse can change its direction and reach 90 degrees in one direction. A potentiometer controls the servo's position. Once the desired position is reached, the power supply to the motor is cut. The servo then remains in this position until another signal is sent.
In addition to visual servo, the visual servo method uses data from the end's location and attitude to predict the end's position and velocity. This method overcomes the problem that the end's coordinate system motion affects the prediction of the target. The method also introduces an integral control method to compensate for the end tracking error caused by the prediction error. Experimental and simulation results validate the effectiveness of this method.
Copyright © Jingbei Technology (Zhejiang) Co., Ltd. Rights Reserved. China Servo Injection Molding Robots Manufacturers